مقالات
مکانیزم تاگل
در طول سالها⸲ تلاشهای زیادی در جهت بهبود کیفیت قطعات تولید شده به روش قالبگیری توسط محققان و صنعتگران صورت گرفته است که یکی از مهمترین پارامترها در تولید قطعات قالبگیری⸲ سیستم گیره میباشد. در سالهای اخیر پیشرفت نرمافزارهای مهندسی کمک شایانی به طراحی و تحلیل مکانیزمهای صنعتی کرده است و میتوان به کمک آنها ابعاد و هندسه مکانیزمها را به گونهای طراحی کرد که به حالت ایدهآل دست یافت. یکی از مکانیزمهای پرکاربرد در صنعت⸲ مکانیزم تاگل میباشد که دارای مدلهای متفاوتی میباشد از جمله آنها میتوان به تاگل پنج نقطهای اشاره کرد. امروزه این مکانیزم در صنایع مختلف از جمله ماشینهای تزریق پلاستیک کاربرد بسیار دارد. مکانیزم تاگل پنج نقطهای دو بعدی از 13 بازو تشکیل شده است که 10 بازوی آن متقارن میباشند و 3 بازوی دیگر اتصال بین آنها را برقرار میکنند. در این تحقیق مکانیزم تاگل از نظر کورس⸲ نیرو و سرعت مورد تحلیل و بهینهسازی قرار میگیرد و برای اینکار از روشهای هندسی⸲ مثلثاتی⸲ تعادل نیرو و کار مجازی استفاده شده است. در ادامه روشها و معادلههای استفاده شده جهت تحلیل مکانیزم تاگل شرح داد میشود.
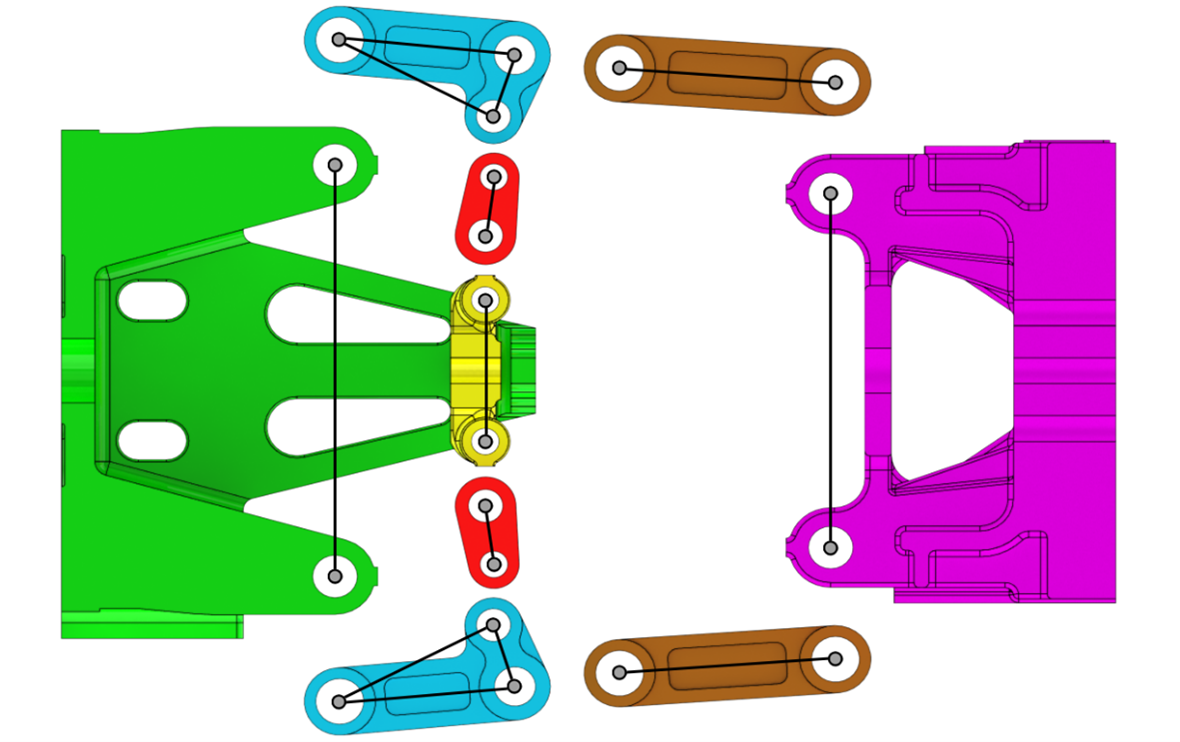
در Error! Reference source not found. زیر سیستم گیره ماشین تزریق پلاستیک تاگل پنج نقطهای در حالت باز و بسته به همراه اجزای تشکیل دهنده آن نشان داده شده است که شامل سه صفحه به نام صفحه تکیهگاه⸲ صفحه متحرک و صفحه ثابت میباشد که تنها صفحه متحرک در این مکانیزم دارای حرکت بوده و دو صفحه دیگر ثابت میباشند. همچنین شامل سه بازوی اصلی شامل بازوی متصل به صفحه تکیهگاه⸲ بازوی متصل به صفحه متحرک و بازوی متصل به صلیبی میباشد که نسبت به محور تقارن این مکانیزم متقارن میباشند. این مکانیزم شامل یک قطعه به نام صلیبی نیز میباشد که نیروی ورودی به این قطعه وارد میشود.
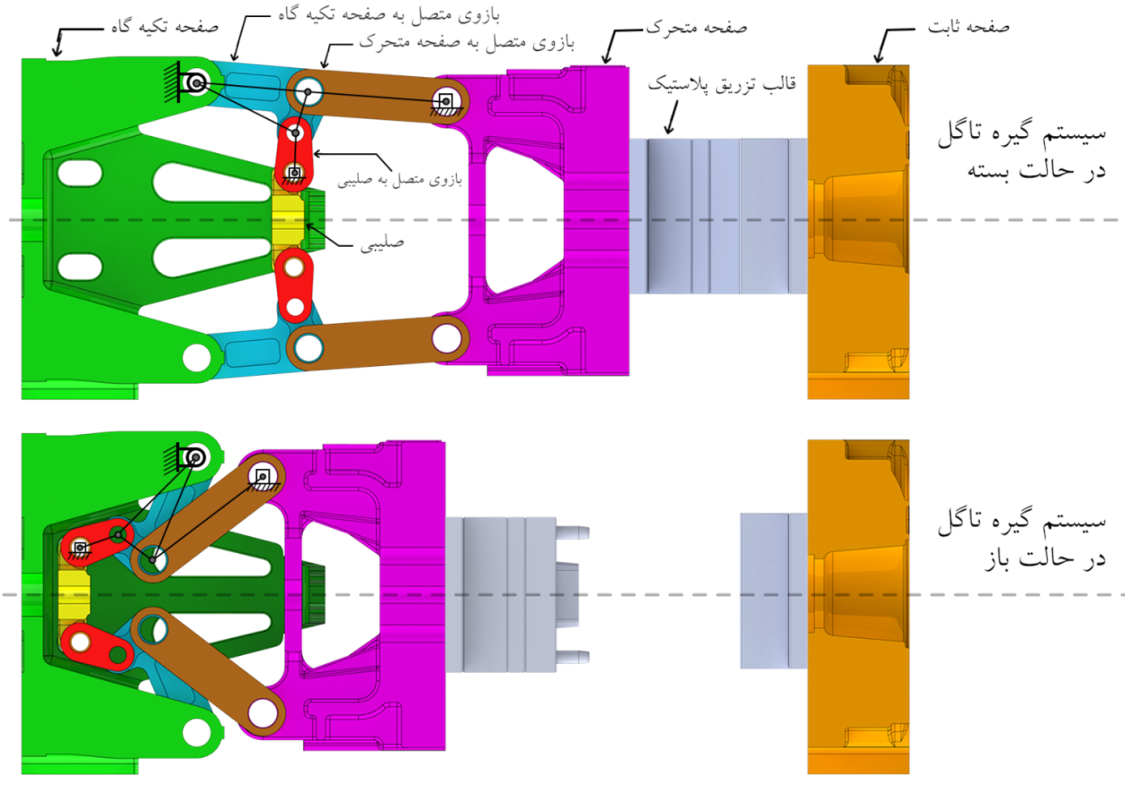
اجزای تشکیل دهنده مکانیزم گیره تاگل ماشین تزریق پلاستیک در حالت باز و بسته
همانطور که در شکل بالا قابل مشاهده میباشد قالب تزریق پلاستیک بین دو صفحه ثابت و متحرک قرار میگیرد که در زمان تزریق گیره بسته میباشد و پس از پایان فرایندتزریق گیره باز شده و قطعه از داخل قالب خارج میشود. از مزیتهای این مکانیزم میتوان به کورس بیشتر با توجه به ابعاد آن نسبت به سیستم سیلندر هیدرولیک مستقیم و قابلیت انعطاف پذیری و آسیب پذیری کمتر در مقابل فشارهای تزریق بالا نام برد. تعداد بازوهای تشکیل دهنده سیستم گیره در حالت سه بعدی متغیر بوده و بیشتر از حالت دو بعدی میباشد که در ادامه مطالب به آن پرداخته خواهد شد اما برای حالت دو بعدی از هر سه بازو دو عدد⸲ که نسبت به هم متقارن میباشند وجود دارد.